Autonomous Robot with PIC Microcontroller
Academic Project | 2022-2023
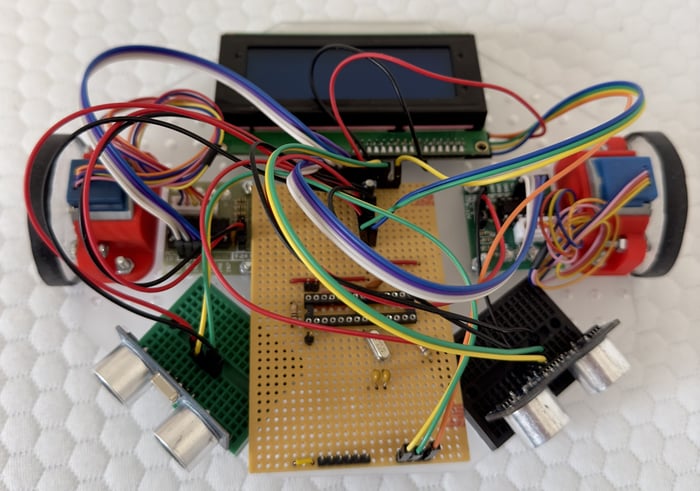
I designed and built an autonomous robot capable of intelligently navigating its environment while collecting and displaying sensor data in real-time. The robot demonstrates core robotics and embedded systems concepts including sensor integration, motor control, obstacle avoidance, and real-time data processing.
↓
Key Technologies Used
PIC16F873A-I/SP microcontroller programmed in C
HC-SR04 ultrasonic sensors for obstacle detection
28BYJ-48 5V stepper motors with ULN2003 drivers for precise movement control
LCM2004 LCD with I2C interface for data visualization
Custom PCB design and hardware integration
Technical Implementation
Hardware Architecture
I designed a complete embedded system around the PIC16F873A microcontroller, integrating multiple peripherals:
Dual ultrasonic sensors positioned for optimal obstacle detection
Two stepper motors with driver boards for differential drive movement
Temperature sensing using a 10k thermistor
I2C LCD interface for real-time data display
16MHz crystal oscillator for precise timing
Software Design
The control software implements several key features:
Real-time obstacle detection and avoidance algorithms
Precise motor control using stepping sequences
I2C communication protocol implementation
Sensor data processing and filtering
LCD interface management
Key Achievements
Complete robot hardware front