Flynn: A 6-Axis Robotic Arm
Academic Project | 2023-2024
Designed and built a high-performance 6-axis robotic arm bridging the gap between industrial and educational robots. Achieved a payload capacity of 1.9kg and repeatability of ±0.2mm while maintaining cost-effectiveness through innovative design and manufacturing approaches.
↓
Key Achievements
Secured sponsorship from StepperOnline and JLCPCB, significantly reducing manufacturing costs
Exceeded initial payload target of 1kg, achieving 1.9kg capacity
Achieved target repeatability of ±0.2mm across all joints
Total cost under £1,400, compared to ~£25,000 for comparable industrial robots
Technical Details
Mechanical Design: Custom-designed components using CAD software (SolidWorks, Shapr3D), combining CNC-machined aluminum parts and 3D-printed components
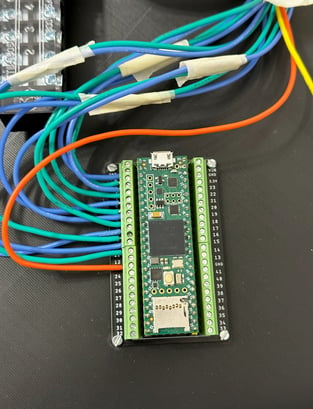
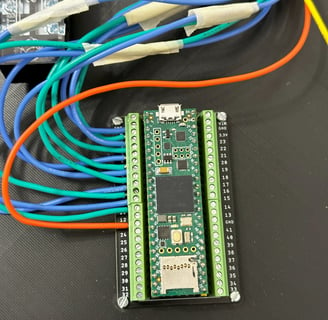
Control System: Implemented using Teensy 4.1 microcontroller with custom firmware and GUI
Motion Control: 6 stepper motors with precision gearing for accurate positioning
Software: Developed using Python for GUI and C++ for microcontroller firmware
Safety Features: Emergency stop system and comprehensive safety control
Demonstration of the calibration sequence of the robotic arm


Key Components
20 CNC-machined aluminum parts
23 3D-printed PLA+ components
6 high-precision stepper motors with encoders
Custom control interface with real-time monitoring
Development Process
Design Phase
Extensive CAD modeling and simulation
Iterative prototyping using 3D printing
Kinematic analysis and optimization
Manufacturing
CNC machining for critical components
3D printing for rapid prototyping and non-load-bearing parts
Assembly and integration testing
Software Development
Custom GUI development
Implementation of forward and inverse kinematics
Integration of safety systems and control algorithms
Final robot arm, control enclosure and emergency stop button.
Skills Demonstrate
Mechanical Design & CAD
Electronics Design
Programming (Python, C)
Project Management
Manufacturing Processes
System Integration
Problem-Solving
Robotics Kinematics
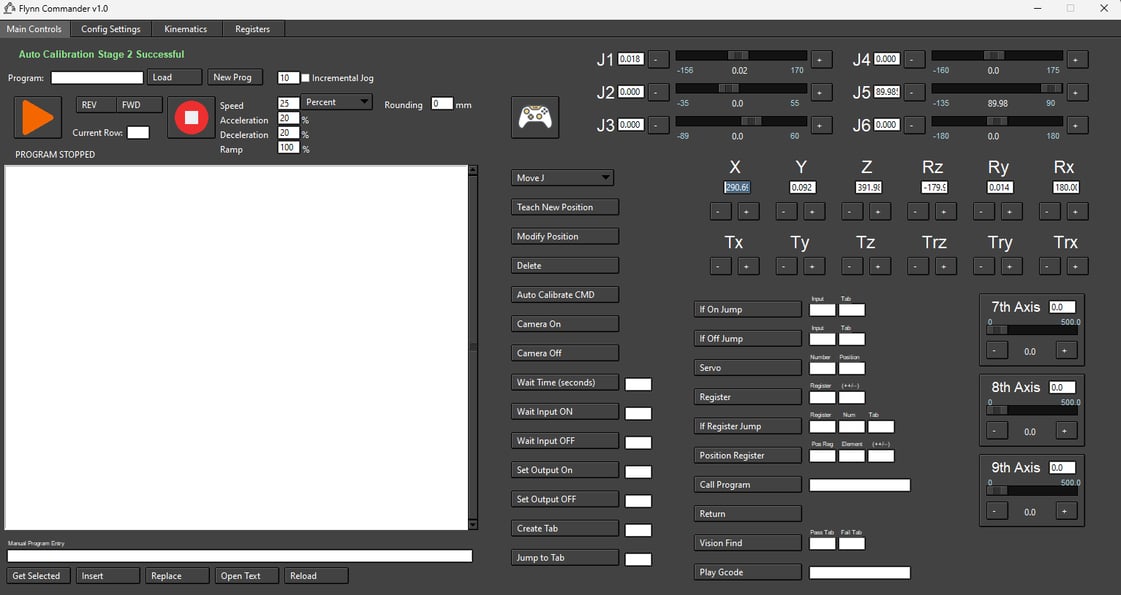
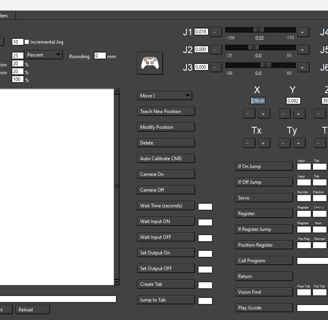
Flynn's Commander Main Controls Software GUI
Future Development
Currently exploring enhancements including:
ROS 2 integration
Advanced motion planning
Additional end-effector options
Precision improvements through hardware and software optimization
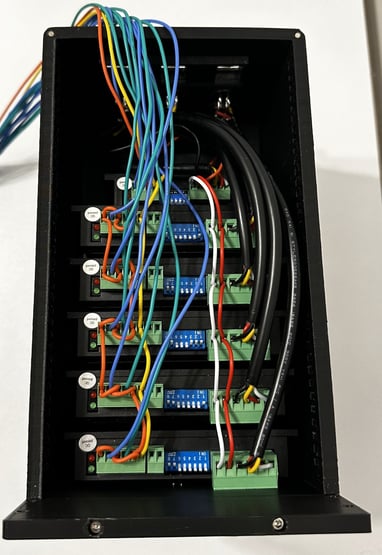
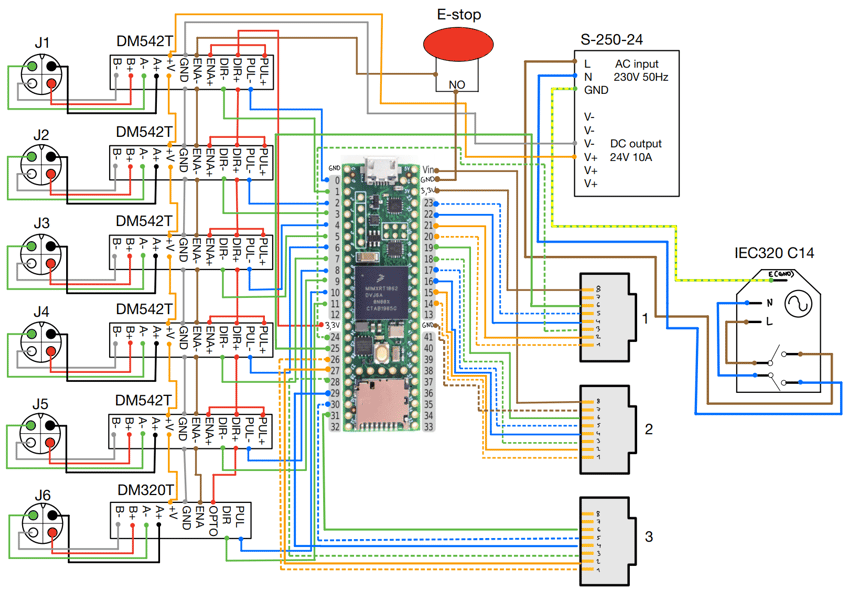
Control enclosure wiring diagram